Timplapse con registrazione circolare
I progetti timelapse basati su schede Raspberry Pi sono numerosi, ben documentati e replicabili. Perchè quindi creare l’ennesimo progetto camera timelapse?
La mia esigenza è quella di creare un sistema che scatta delle fotografia ad intervalli regolari, ma con la possibilità di registrarle in modo circolare. Cosa significa registrazione circolare?
Il classico timelapse esegue un numero continuo di scatti. Il timelapse circolare invece, dopo aver raggiunto un numero massimo di scatti continua la sequenza di registrazione sovrascrivendo le foto meno recenti.
Questo sistema ha il vantaggio di non andare mai a saturare la memoria e quindi si adatta in tutte quelle situazioni in cui non possiamo andare spesso a scaricare le fotografie.
Infatti questo sistema è utile quando viene installato in zone remote e quando non abbiamo la certezza di andare a scaricare le foro in maniera regolare avendo la certezza che la registrazione saturerà la memoria del Raspberry.
Nel dispositivo che ho realizzato ho inserito anche una serie di pulsanti in modo da avere un sistema gestire il software senza usare l’interfaccia grafica.
Lo scarico dei dati avviene utilizzando dei pulsanti che permettono di stoppare il timelapse, trasferire i files sulla pen drive e riprendere il ciclo di funzionamento.
Nella figura seguente è possibile osservare lo schema elettrico.
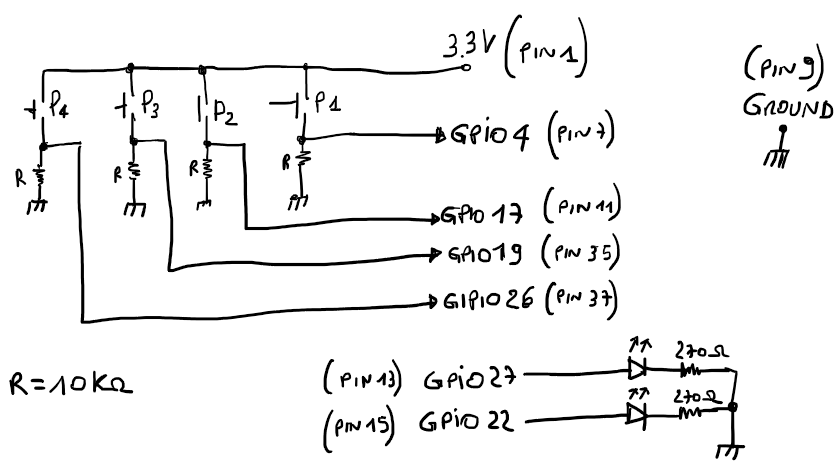
I quattro ingressi del Raspberry sono normalmente bassi (resistenze da 10k collegate a massa), premendo un pulsante porteremmo la 3.3Vdc sul pin di ingresso. I due led invece servono per avere delle indicazioni luminose sull’operazione che il software sta eseguendo.




Il codice scritto in Python permette di acquisisce e memorizzare le foto, gestisce i pulsanti i led e scaricare le foto sulla pen drive.
from picamera import PiCamera
from os import system
import shutil
import time
import RPi.GPIO as GPIO
import os.path
import os
src_folder = "/home/pi/PythonProject/tl_pics/"
dest_folder = "/media/pi/logicapro/foto"
StartTL = True
AutoStart = True
i = 0
loop = False
newloop = False
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(19, GPIO.IN)
GPIO.setup(26, GPIO.IN)
GPIO.setup(4, GPIO.IN)
GPIO.setup(17, GPIO.IN)
GPIO.setup(27, GPIO.OUT)
GPIO.setup(22, GPIO.OUT)
#led rosso on giallo off
GPIO.output(27, GPIO.HIGH)
GPIO.output(22, GPIO.LOW)
camera = PiCamera()
camera.resolution= (1024,768)
pics_id = open('/home/pi/PythonProject/PicsIndex.dat')
i = int(pics_id.read())
pics_id.close()
if (i>0):
loop=True
def StopTL(channel):
global StartTL
global AutoStart
print("STOP TL")
if StartTL == True:
StartTL = False
AutoStart = False
print ("StartTL =", StartTL)
print ("AutoStart =", AutoStart)
GPIO.output(27, GPIO.HIGH)
time.sleep(1)
def RunTL(channel):
global StartTL
global AutoStart
print("START TL")
if StartTL == False:
StartTL = True
AutoStart = True
print ("StartTL =", StartTL)
print ("AutoStart =", AutoStart)
pics_id = open('/home/pi/PythonProject/PicsIndex.dat')
i = int(pics_id.read())
print ("RunTL i =", i)
pics_id.close()
GPIO.output(27, GPIO.LOW)
GPIO.output(22, GPIO.LOW)
time.sleep(1)
GPIO.add_event_detect(17, GPIO.RISING, callback=StopTL, bouncetime=500)
GPIO.add_event_detect(4, GPIO.RISING, callback=RunTL, bouncetime=500)
while True:
#primo pulsante
if AutoStart == True:
#start timelapse
while (StartTL):
i += 1
#print (i)
if loop==True:
#print ("i=", i)
try:
t = time.localtime()
anno = str(t[0])
mese = str(t[1])
giorno = str(t[3])
#print(giorno + "-" + mese + "-" + anno)
#se esiste il file lo cancello
if (os.path.isfile('/home/pi/PythonProject/tl_pics/image{0:05d}.jpg'.format(i)) == True):
print("elimino file esistente ".format(i))
os.remove('/home/pi/PythonProject/tl_pics/image{0:05d}.jpg'.format(i))
print("Eseguo shot " + str(i))
camera.capture('/home/pi/PythonProject/tl_pics/image{0:05d}.jpg'.format(i))
time.sleep(0.7)
GPIO.output(27, GPIO.HIGH)
time.sleep(0.3)
GPIO.output(27, GPIO.LOW)
#time.sleep(60)
pics_id = open('/home/pi/PythonProject/PicsIndex.dat', 'w')
pics_id.write(str(i))
pics_id.close()
print("pic_shot = " + str(i))
except (e):
print("Errore shot " + str(i))
f = open('/home/pi/PythonProject/Error.txt', 'a')
f.write("Errore shot file " + str(e) + " ")
f.write(str(i) + "\n")
f.close()
except:
print("Errore generico shot " + str(i))
f = open('/home/pi/PythonProject/Error.txt', 'a')
f.write("Errore shot file " + str(i) + " \n")
f.close()
fc = open('/home/pi/PythonProject/CopyLog.txt', 'a')
fc.write("Current shot ")
fc.write(str(i) + "\n")
fc.close()
#attendi 2 minuti 60x2sec
for tempo in range (60): #range(60):
GPIO.output(22, GPIO.HIGH)
time.sleep(0.1)
GPIO.output(22, GPIO.LOW)
time.sleep(1.9)
if StartTL == False:
break
#10080 5040
if i >= 4320:
i=0
loop=True
print("NEW LOOP")
time.sleep(1)
if GPIO.input(17):
break
print ("Exit loop")
#terzo pulsante
if GPIO.input(19):
#crea un video dai file del timelapse
print("Terzo Pulsante")
GPIO.output(22, GPIO.HIGH)
time.sleep(0.5)
GPIO.output(22, GPIO.LOW)
time.sleep(0.5)
GPIO.output(22, GPIO.HIGH)
time.sleep(0.5)
GPIO.output(22, GPIO.LOW)
time.sleep(0.5)
GPIO.output(22, GPIO.HIGH)
time.sleep(0.5)
GPIO.output(22, GPIO.LOW)
time.sleep(0.5)
os.system("sudo reboot")
#quarto pulsante
#copia le foto nella cartella della pen drive
if GPIO.input(26):
GPIO.output(27, GPIO.HIGH)
GPIO.output(22, GPIO.HIGH)
time.sleep(1)
try:
print("Copia file in corso")
time.sleep(1)
src = os.listdir(src_folder)
for files in src:
GPIO.output(22, GPIO.HIGH)
time.sleep(0.1)
if (files.endswith(".jpg")):
shutil.copy("/home/pi/PythonProject/tl_pics/" + files, dest_folder + "/" + files)
print(files)
GPIO.output(22, GPIO.LOW)
time.sleep(0.1)
#fine copia files
GPIO.output(27, GPIO.LOW)
GPIO.output(22, GPIO.LOW)
os.system("sudo umount /media/pi/logicapro")
time.sleep(3)
print("Copia file terminata")
AutoStart=True
StartTL = True
except (IndexError):
print("Errore copia file")
AutoStart=False
GPIO.output(22, GPIO.HIGH)
GPIO.output(27, GPIO.HIGH)
time.sleep(3)
GPIO.output(22, GPIO.LOW)
GPIO.output(27, GPIO.LOW)
f = open('/home/pi/PythonProject/Error.txt', 'a')
f.write("Errore copia file ")
f.write(str(files) + "\n")
f.close()
except (Exception, e):
print("Errore generico")
f = open('/home/pi/PythonProject/Error.txt', 'a')
f.write("Errore generico " + str(e))
f.write(str(files) + "\n")
f.close()
AutoStart=True
StartTL = True
GPIO.cleanup()
I commenti nel codice illustrano come lavorano le istruzione Python.
Per la realizzazione ho scelto di utilizzare una Raspberry Pi ZERO, principalmente per il basso costo e le dimensioni contenute. La Pi camera può essere sostituita con la versione ir.
Per quanto riguarda l’alimentazione della scheda in zone remote è necessario un pannello solare, un regolatore di carica e una batteria dimensionati opportunamente per fornire la corrente per alimentare la Pi Zero e la Pi Camera.