Tutorial per realizzare un quadricottero
introduzione
Il mondo dei quadricotteri si sta diffondendo in modo esponenziale negli ultimi tempi, troviamo modelli di ogni tipo con funzioni diversificate, dai modelli ultra sofisticati per rilievi e riprese video fino a modelli giocatolo da poche decine di euro, passando per quelli destinati al trasporto di piccoli oggetti o a modelli impiegati nel soccorso e nel controllo. Costruire e capirne il funzionamento è un’esperienza molto soddisfacente anche se i costi, purtroppo, per realizzare un semplice modello non sono molto contenuti, probabilmente si arriverà ad una spesa tra i 200 e i 350€.
Ho passato diverso tempo nel cercare informazioni tecniche e nella realizzazione di un modello, superando diverse difficoltà, a volte banali, che vorrei condividere con voi scrivendo alcuni tutorial. Non mi reputo un esperto in materia quindi potrei fare alcuni errori nell’affrontare certi concetti, ma in vari siti, anche esteri, non ho trovato tutti i passaggi dettagliati che portano alla costruzione di un quadricottero in maniera semplice, ma se in alcuni la parte software è spiegata egregiamente non lo è la parte hardware o viceversa.
Quindi quello che cercherò di fare è di scrivere una guida passo passo sulle procedure che portano a far volare un piccolo quadricottero.
Il quadricottero
Questo aeromodello appartiene alla famiglia dei multirotori composti da 3 o più motori dotati di eliche. Nel quadricottero, come facilmente intuiamo, ci sono quattro motori con relative eliche che permettono di eseguire manovre tipiche di un elicottero (salire in quota, scendere ed andare avanti indietro a destra e sinistra) ma con un andatura in volo che riprende le manovre degli aerei (Beccheggio, Rollio, Imbardata).
E’ essenziale per avere un volo stabile che due motori ruotino in senso orario e due motori in senso antiorario. Nell’elicottero la stabilità viene garantita dal rotore di coda che contrasta il movimento rotatorio del rotore principale.
Il quadricottero, avendo i motori e le eliche montate nello stesso piano, deve equilibrare il moto impiegando due motori che ruotano in senso orario e due in senso antiorario.
La contrapposizione dei motori permette quindi di annullare l’energia rotatoria degli stessi.

Anche le eliche devono essere montate in modo appropriato, infatti nei due motori che girano in senso orario andranno montate le eliche CW mentre le nei due motori che girano in senso antiorario dobbiamo montare le eliche CCW.
Configurazione
Le configurazioni tipiche di un quadricottero sono due e vengono definite dalla direzione di volo in relazione alla posizione dei motori; nella figura seguente potete osservare il modo x ed il modo +:


Nella configurazione + la direzione di volo corrisponde all’asse creato dai motori M1 e M4 mentre, nella configurazione x la direzione di volo corrisponde all’asse creato tra i motori M1 e M3 e l’asse creato tra i motori M2 e M4.
I motori, dotati di eliche, sono rappresentati in figura dalle sigle M1, M2, M3, e M4 e vengono montati, tipicamente, alle estremità degli assi del telaio (Frame), l’elettronica di controllo e la batteria sono montati solitamente al centro del drone, dove si intersecano gli assi.
Tra le due configurazioni quella che personalmente preferisco è quella a x, che utilizzerò per il corso del tutorial.
Come vola il quadricottero
E’ necessario fare una piccola parte teorica per conoscere come vola il nostro quadricottero, questo per me è stato importante sia per capire come montare i vari componenti sia per quanto riguarda la gestione del quadricottero durante primi voli.
Ammettiamo di avere già tra le mani un quadricottero funzionante e pronto al volo.
Una volta avviati i motori, questi andranno teoricamente alla stessa velocità di rotazione, tramite l’acceleratore del radiocomando (throttle) potremo variare questo valore aumentandolo o diminuendolo.
Quando la velocità di rotazione delle eliche permette di avere una portanza capace di contrastare il peso del quadricottero, esso inizierà a sollevarsi da terra, portandosi a una certa quota.
Ora, nel sempre nel caso teorico, in cui i pesi del quadricottero sono perfettamente identici in tutti gli assi, e non ci sono elementi esterni che disturbano il volo come folate di vento, la velocità di rotazione dei quattro motori rimane uguale.
Immaginiamo ora che la velocità di rotazione dei motori sia tale da tenere il quadricottero a una quota di 1 metro dal suolo.
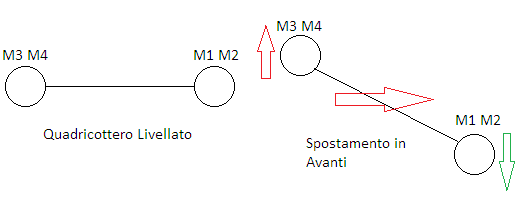
Beccheggio (PITCH)
Consideriamo sempre il nostro quadricottero in volo è perfettamente stabile (situazione teorica), per poterlo far muovere in avanti dovremmo agire sul beccheggio. Per farlo muovere in avanti la centralina di controllo montata al centro del quadricottero, dovrà aumentare la velocità di rotazione dei motori posteriori M3 e M4 e diminuire la velocità di rotazione dei motori anteriori M1 e M2. In questo caso il modello si inclinerà in avanti permettendone il movimento verso quella direzione.
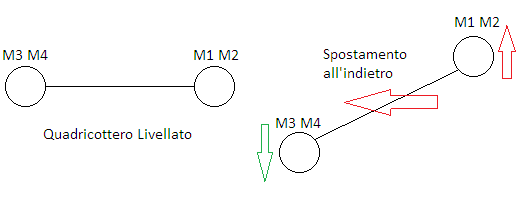
Per portare il quadricottero indietro la centralina dovrà eseguire l’operazione opposta, ovvero aumentare la velocità di rotazione dei motori M1 e M2 e diminuire la velocità di rotazione dei motori M3 e M4:

Rollio (ROLL)
Tramite il rollio potremo far spostare il nostro quadricottero lateralmente. Anche in questo caso il movimento del quadricottero avviene variando la velocità dei motori in modo tale da poter inclinare su un lato il quadricottero permettendone quindi lo spostamento a destra o sinistra.



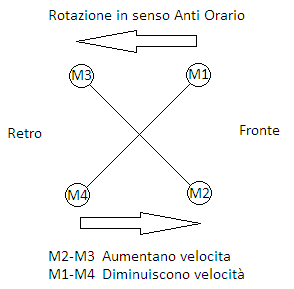
Imbardata (YAW)
L’altro movimento che può eseguire il quadricottero è la rotazione su se stesso, definita imbardata. Il movimento avviene variando la velocità di rotazione di due motori posizionati nello stesso asse.
Credo che per ora queste nozioni siano quelle basilari che dobbiamo conoscere ed imparare per poi affrontare nel prossimo articolo la parte relativa a tutti gli elementi che compongono il quadricottero.
Se vuoi subito iniziare a volare prova quadricotteri pronti al volo come questo