Come costruire un quadricottero. Unire i componenti.
Dopo aver affrontato in maniera generica gli argomenti basilari riguardanti il volo e i componenti che compongono un quadricottero, è il momento di iniziare a smanettare con cacciaviti e saldatore per assemblarli tra loro.
Il materiale che ho acquistato per realizzare il quadricottero è elencato di seguito:
- Frame HobbyKing X525 V3
- HobbyKing Scheda di distribuzione alimentazione
- Eliche 10×4.5 in plastica
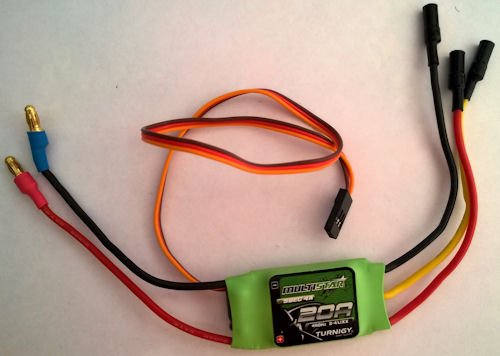
- ESC Turnigy Multistar 20 Amp 2-4S OPTO
- NTM Prop Drive Series 28-26 1100Kv
- NTM Prop Drive Accessory Pack (Mozzo portaelica e supporto)
- Batteria LiPo 3S Zippy Compact 4Ah 25C
- Radiocomando Turnigy 6XS
I componenti sono stati acquistati da HobbyKing.com, ma potete recuperarli anche in altri negozi online. E’ possibile acquistare materiali simili che rispettino le stesse caratteristiche tecniche ad esempio un Esc di altra marca che eroghi comunque 20A, oppure un radiocomando modo 2 piuttosto che modo 1.
Per chi acquista da HobbyKing.com per la prima volta il mio consiglio è quello di selezionare il magazzino europeo o inglese tramite l’apposito link, in modo da non avere problemi relativi a pagamenti doganali aggiuntivi, poiché di default la merce arriva dal magazzino cinese.
Dovete anche procurarvi un minimo di attrezzatura, come chiavi e cacciaviti, un saldatore a stagno e eventualmente una terza mano, utile per tenere fermi i componenti mentre effettuate le saldature.
Il primo componente da assemblare è il frame, l’elemento che permetterà di ospitare tutti gli altri componenti che formano il quadricottero. Questo telaio è abbastanza leggero e discretamente robusto e un costo contenuto. Le istruzioni di montaggio sono disponibili seguendo questo link.
L’assemblaggio è molto importante, dovete assicurarvi che tutti gli elementi siano ben uniti tra loro, allo stesso tempo non dovete irrigidire troppo la struttura serrando al massimo le viti. Dovete cercare di trovare un compromesso. Questo telaio ha la possibilità di essere ripiegato per il trasporto, io non sono molto favorevole, quindi tenete fermi gli assi stringendo le viti di bloccaggio, il telaio non è molto grande e può essere trasportato anche senza ripiegarlo.
Di seguito alcune foto del mio assemblaggio:



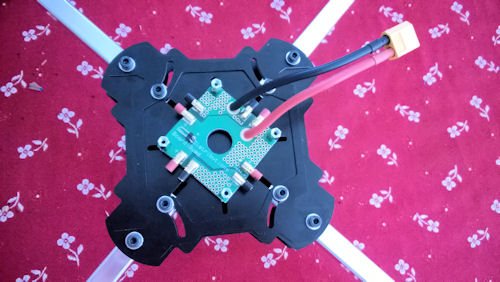


Una volta terminato il montaggio del telaio andiamo a installare la scheda di distribuzione dell’alimentazione. Questa schedina dal costo di qualche euro è molto comoda perché permette di fornire energia agli Esc ed all’elettronica di bordo utilizzando dei connettori a pressione.
Ho orientato la scheda in modo da avere le prese di collegamento in direzione degli assi, questo permette di tenere i cablaggi ordinati.
Mettiamo da parte il telaio e prendiamo i 4 motori con i relativi accessori porta elica. Fissiamo il blocco dell’elica al motore utilizzando le tre viti in dotazione. Prima di inserire le viti sarebbe opportuno mettere una goccia di frena filetto per evitare che le vibrazioni allentino le viti. Assembliamo i porta elica in tutti e quattro motori, accertandosi nuovamente che le viti siano ben strette.



Riprendiamo il telaio e andiamo a montare i quattro motori sugli alloggiamenti del telaio utilizzando i supporti a croce e le viti. I fori filettati presenti sulla parte inferiore del motore non sono posizionati alla stessa distanza quindi dovremmo posizionare l’accessorio di blocco facendo combaciare i fori. Verificate che il motore sia montato correttamente e soprattutto che sia ben poggiato sul supporto del telaio.



Il lavoro maggiore, dovuto nell’assemblare le pari meccaniche è pressoché concluso, ora installeremo gli Esc utilizzando principalmente delle fascette di plastica auto serranti.
Iniziamo a collegare i 3 connettori di uscita dell’Esc al motore.In base alcollegamento il motore potra girare o in verso antiorario o in verso orario, ora non badiamo a questo aspetto ma assicuriamoci solamente che il collegamento dei tre fili sia ben saldo. Assicuriamo l’Esc al telaio utilizzando due fascette e stringendole quanto basta affinché sia ben ferma. Gli altri due fili dell’Esc devono invece essere collegati alla scheda di distribuzione dell’alimentazione. Se i cavi sono troppo lunghi dovremmo tagliarli, risaldare i bussolotti e ricollegarli alla scheda.
Le immagini seguenti illustrano il montaggio di un Esc.



Eseguiamo il montaggio degli Esc cercando di realizzare un cablaggio semplice, ma allo stesso assicuriamoci che tutto sia ben saldo al telaio, aiutatevi, se ritenete opportuno, con ulteriori fascette auto serranti.
La maggior parte dei componenti è stata montata, verifichiamo ulteriormente che tutte le viti siano serrate, che ogni elemento sia montato correttamente e che i fili elettrici non si muovano o abbiano la possibilità di sganciarsi dai motori o dalla scheda di distribuzione dell’alimentazione.
Eseguire questa verifica è una procedura che imparerete a farla costantemente ogni volta che farete volare il quadricottero, la sicurezza del volo dipende anche da queste verifiche che scongiurano incidenti causati da distacchi di parti del quadricottero durante il volo. Il quadricottero è un aeromodello molto divertente ma può essere anche molto pericoloso quindi dovete assicurarvi sempre di farlo volare in totale sicurezza anche perché in caso di incidente la responsabilità cadrà su di voi.
Nel prossimo articolo andremo ad installare la centralina di controllo.
Ciao, come ti trovai con i motori NTM Prop Drive?
Ho sentito che parecchia gente ha avuto problemi, sono buoni come motori?
Grazie
Ciao Alessandro
sono motori molto economici, senza pretese, vanno bene per costruire piccoli quadricotteri prototipo. Meglio danneggiare un motore economico che comprare motori qualitativamente superiori per poi spaccarli nei primi voli di test. Io nei primi voli ho fatto crashare il quadricottero diverse volte, i motori NTM hanno retto discretamente. Ora che ho più dimestichezza ho comprato dei motori FullPower.
Quindi se hai già fatto volare un quadricottero potresti prendere dei motori decisamente migliori rispetto agli NTM.
Marco
Tutorial molto interessante!! Soprattutto utile, a quando il prossimo articolo?
Ciao, potresti concludere il tutorial o spiegare brevemente come collegare la scheda di distribuzione, la scheda arduino al ricevitore e come comunicare con il quadricottero?
Grazie e complimenti per il lavoro svolto!
Ciao
sto realizzando il tutorial, purtroppo non ho tanto tempo libero!!
stay tuned
Marco
Ciao Marco.
Bella guida che hai fatto! comunque quando riuscirai a completare l’intera guida. riesci a fare anche una piccola guida sul programma da caricare su arduino? ho guardato quello che la multiwii fornisce ma non ho capito molto dove sono messi i i comandi del radiocontrollo. Grazie
Ciao, vorrei sapere se per caso è possibile installare una gimbal